Por: Filomena Campelo Faria, José Pedro Araújo e Joaquim Lima Cerqueira, Escola Superior Agrária do Instituto Politécnico de Viana do Castelo
Introdução
O sector da produção leiteira conheceu, nas últimas décadas, uma evolução significativa, realizada em períodos de tempo cada vez mais curtos, acompanhando o avanço da tecnologia.
Os sistemas voluntários de ordenha, mais conhecidos como robots de ordenha, são mais uma alternativa aos convencionais. Introduzir um sistema de ordenha robotizada numa exploração não constitui somente adoptar um novo método de ordenha, mas sim optar por um novo método de criação de bovinos leiteiros, que requer alterações na alimentação e na estabulação, afectando não só a produção e a qualidade do leite, mas também o comportamento e o bem-estar dos animais (Pirlo et al., 2005).
As primeiras ideias sobre a ordenha completamente automatizada surgiram a meados dos anos setenta. O primeiro passo foi o desenvolvimento de sistemas fiáveis de identificação animal e as primeiras aplicações destes passos prévios foram os sistemas automáticos de alimentação. O passo seguinte foi o desenvolvimento de sistemas de retirada automática de tetinas, até que no início dos anos oitenta se desenvolveram os primeiros sistemas automáticos de colocação de tetinas, os quais viriam a ser fundamentais para a completa automatização da ordenha (Meijering et al., 2002 citados por Alves, 2010).
Os sistemas de ordenha robotizada têm por objectivo a produção eficiente de leite, através da automatização completa do processo de ordenha, através de diversos sub-sistemas, que coordenam as funções do processo de ordenha e a gestão do efectivo. Ao contrário da ordenha convencional, onde são os produtores que levam os animais à ordenha a horas regulares (normalmente duas vezes por dia), os sistemas automáticos dependem da motivação dos animais para se dirigirem ao robot de ordenha, numa lógica de selfservice, várias vezes ao dia (Koning e Rodenburg, 2004).
A utilização do sistema de ordenha robotizada conduz a profundas alterações na gestão e no maneio do efectivo. Na verdade, comparado com um sistema convencional, os animais em sistemas de ordenha robotizada apresentam maior liberdade para escolherem os seus ritmos e actividades diárias, o que tem repercussões no seu comportamento e bem-estar. Os aspectos relacionados com o bem-estar animal prendem-se sobretudo com a alimentação e a interacção social, com o desenho das instalações e com o tráfego dos animais. Desta forma, a investigação e avaliação do bem-estar nas explorações com sistemas de ordenha robotizada tem sido orientada para o controlo e optimização do tráfego, a interacção entre animais no acesso à unidade de ordenha e questões relacionadas com o comportamento alimentar (Pastell et al., 2006).
Resultados de estudo realizado na região Norte de Portugal
O objectivo do estudo consistiu na avaliação do desempenho de 5 robots em três explorações de bovinos de leite na região Norte de Portugal.
Os resultados do estudo de desempenho do Sistema de Ordenha Robotizada (SOR) evidenciam a importância da realização de um maior número de ordenhas, que se reflecte no acréscimo da produção média diária de leite.
Cada exploração apresentou indicadores diferentes para a utilização do SOR, que estão relacionados com causas multifactoriais, muito específicas de cada unidade produtiva.
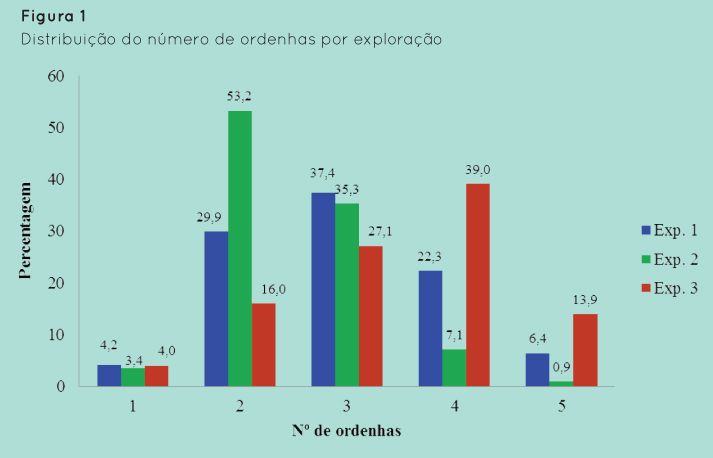
Como seria de esperar a frequência de animais com apenas uma ordenha diária é bastante baixa em todas as explorações (3,4% a 4,2%). Na exploração 2 mais de metade do efectivo (53%) realiza duas ordenhas por dia, sendo na exploração 3 uma frequência de apenas 16%. O patamar das 3 ordenhas diárias é um dos mais importantes, pois com a ordenha convencional raramente é possível efectuá-las por uma questão de disponibilidade de mão-de-obra. Neste caso verificou-se um desempenho muito semelhante entre as três explorações, oscilando entre 27% a 37%. De destacar é o facto da exploração 3 ter apresentado uma frequência de quatro e cinco ordenhas diárias em cerca de 53% dos animais. A Figura 1 permite-nos ainda afirmar que a exploração com melhor desempenho para o SOR foi a 3, seguida da 1, e a exploração 2 foi a que demonstrou menor eficiência relativamente ao número de ordenhas diárias.
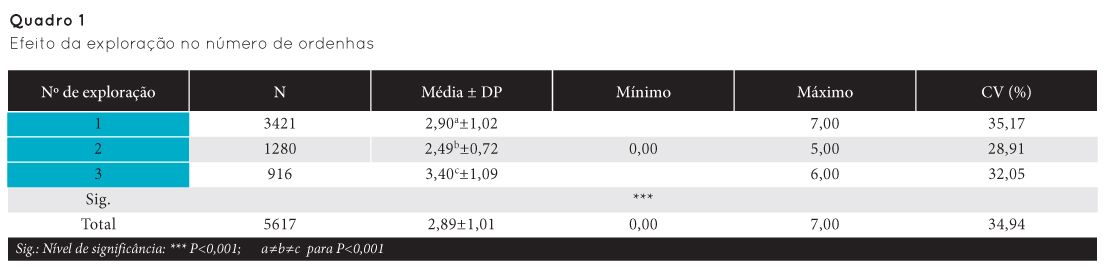
Constatou-se um efeito da exploração no número de ordenhas diárias (Quadro 1), com diferenças significativas (P<0,001), entre todas as explorações. A exploração 3 apresentou o número mais elevado de ordenhas/dia (3,4) e a exploração 2 o valor mais reduzido (2,5 ordenhas/dia).
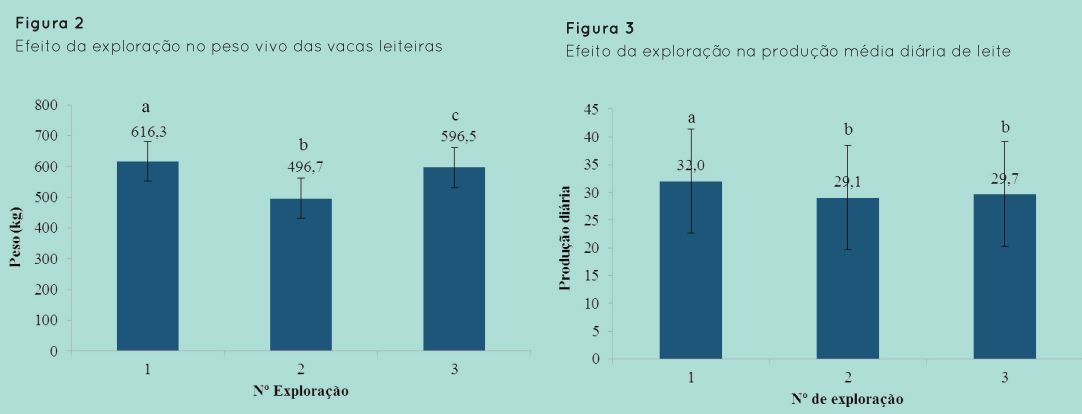
Encontraram-se diferenças significativas (P <0,001) entre explorações para o peso vivo dos animais (Figura 2). Os animais da exploração 1 são os mais pesados (616,3 kg) e os da exploração 2 os mais ligeiros (496,7 kg).
Observaram-se diferenças significativas (P<0,001) entre explorações para a produção média diária de leite (Figura 3). A exploração 1 apresentou uma produção média diária de 32,0 kg/dia, superior às outras duas explorações. Este facto pode dever-se a fatores genéticos, qualidade e disponibilidade de alimento, condições das instalações, maneio e número de animais por robot.
Observaram-se diferenças significativas (P<0,001) entre todas as explorações para o tempo de ligação (Quadro 2). A exploração 3 registou metade do tempo de ligação (0,34 min), comparativamente à exploração 1 (0,63 min). Numa exploração com SOR o tempo de ordenha está directamente relacionado com o tempo de ligação, embora para o tempo de ordenha não tenha ocorrido diferenças entre as explorações.
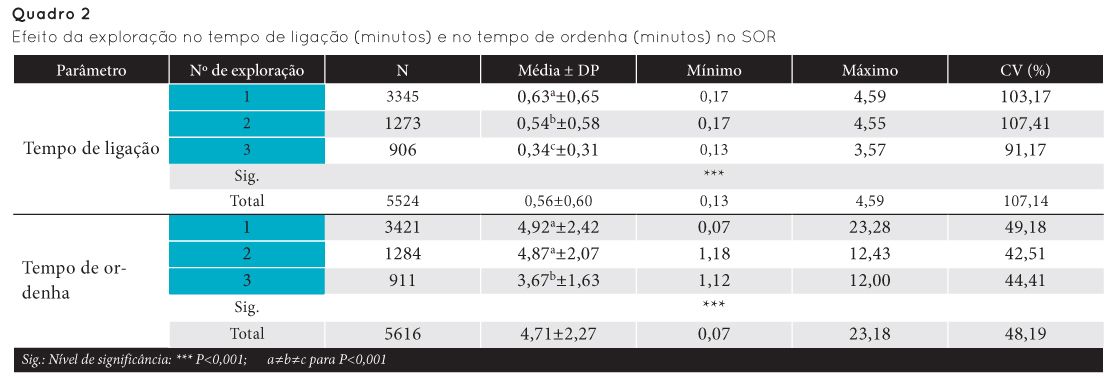
Encontraram-se diferenças (P<0,001) no tempo de ordenha, da exploração 3 relativamente às outras duas, tendo revelado o menor tempo de ordenha (3,67 min), inferior em cerca de 1,20 minutos, permanecendo o animal menos tempo na boxe.
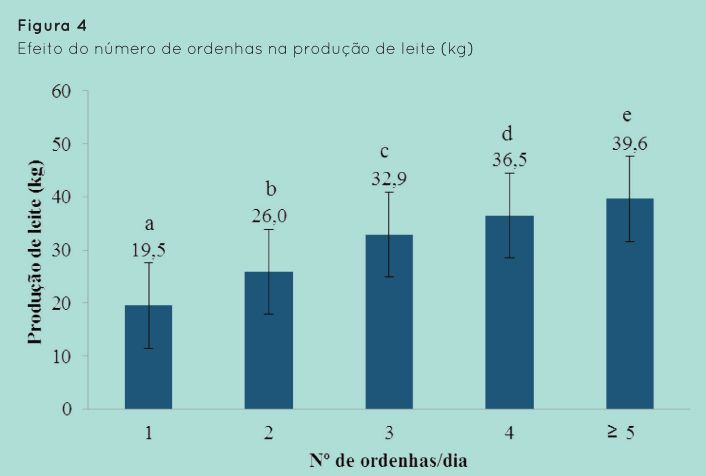
Uma das vantagens da instalação do SOR consiste no controlo do número de ordenhas diárias adequado a cada animal. Assim torna-se possível aumentar a produção de leite pela maior frequência de ordenhas diárias.
Constatou-se efeito do número de ordenhas na produção diária de leite (Figura 4), com diferenças (P<0,001) entre todas as ordenhas. Os animais com 1 ordenha produziram 19,5 kg e os animais com 5 ou mais ordenhas 39,6 kg. Os animais que visitam mais frequentemente o robot são normalmente aqueles que demonstram maior capacidade de produção ou os que se encontram no pico da lactação.
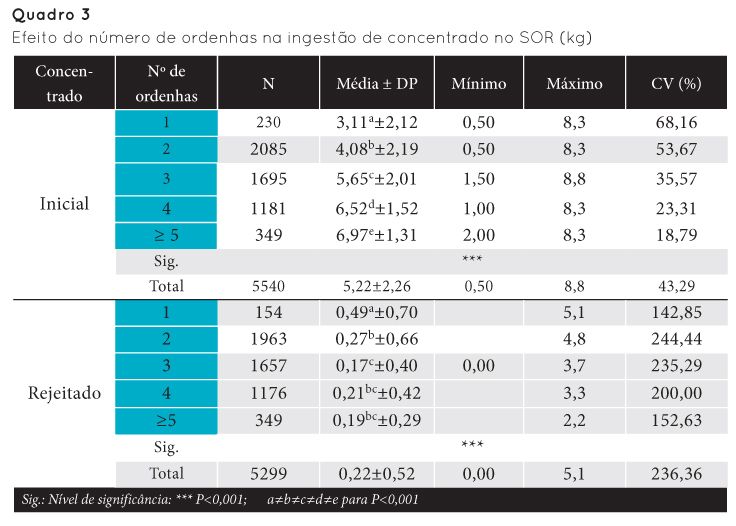
Comprovou-se a existência de diferenças significativas (P <0,001) entre ordenhas para o concentrado administrado (Quadro 3). Os animais que são ordenhados mais vezes ao dia consomem maior quantidade de ração. Normalmente o SOR administra o concentrado de acordo com o número de visitas, relacionando-se com a produção de leite. Uma vaca ordenhada 5 vezes ou mais por dia, ingere mais 4 kg de concentrado comparativamente a 1 ordenha por dia. O concentrado rejeitado é superior (P<0,001) nos animais ordenhados 1 vez ao dia (0,49 kg) comparativamente a um maior número de ordenhas, com exceção dos animais que efectuam 3 ordenhas, que apenas rejeitam 0,17 kg de ração.
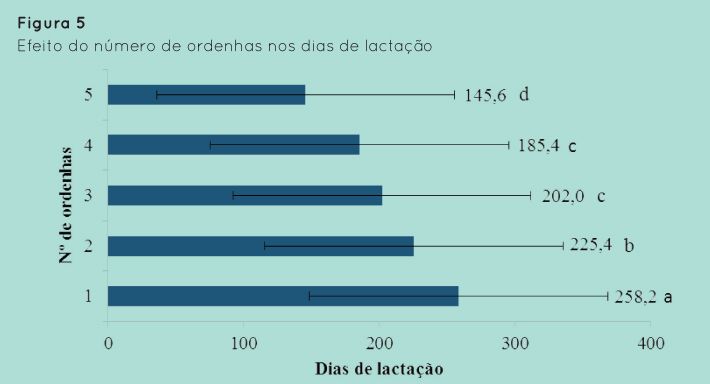
O número de ordenhas revelou um efeito (P<0,001) nos dias de lactação, assim observou-se que os animais com menor número de ordenhas se encontram com mais dias de lactação. As vacas com 5 ou mais ordenhas por dia encontravam-se com 146 dias de lactação (Figura 5).
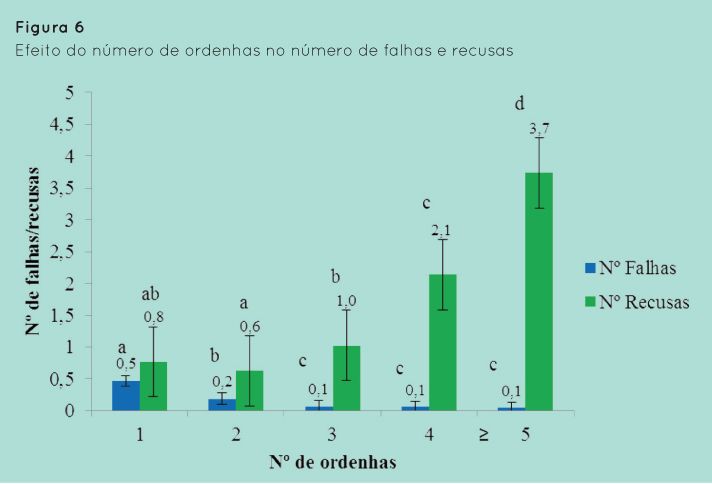
O número de falhas e recusas é inversamente proporcional ao número de ordenhas realizadas por dia (Figura 6). Os animais com uma ordenha por dia revelaram um maior número de falhas (0,5), comparativamente aos animais com três ou mais ordenhas (0,1). Os animais que realizaram 5 ou mais ordenhas apresentaram maior número de recusas (3,7), enquanto os animais com 2 ordenhas registaram em média 0,6 recusas.
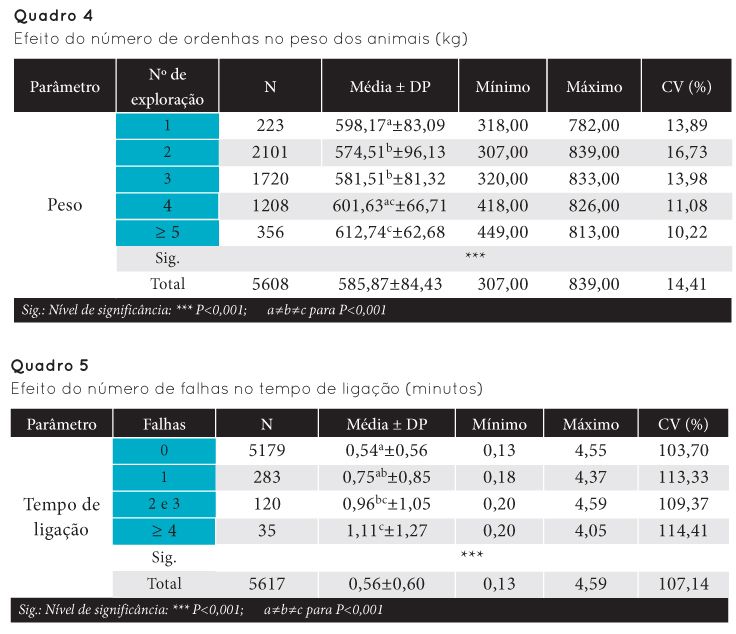
As vacas mais pesadas (>601,6 kg), apresentaram maior número de ordenhas (=4), embora não se tenham encontrado diferenças de peso vivo nos animais que realizaram apenas 1 ou 4 ordenhas (Quadro 4).
Encontrou-se um efeito (P<0,001) do número de falhas no tempo de ligação do conjunto de tetinas (Quadro 5), ou seja à medida que aumenta o número de falhas, verifica-se maior tempo de ligação, pois o tempo de ligação duplica quando se passa de nenhuma para quatro ou mais falhas.
Conclusão
Os sistemas de ordenha robotizada permitem uma produção eficiente de leite, através da automatização completa do processo de ordenha, levando em consideração o bem-estar animal e humano. A maioria dos produtores tenta maximizar a quantidade de leite recolhida diariamente optimizando o número de animais ordenhados e a frequência de ordenhas de cada animal.
Observou-se alguma variabilidade entre as explorações estudadas no número de ordenhas diárias, com uma média de 2,9 ordenhas/vaca/dia nas três esplorações, situando-se dentro dos parâmetros recomendados pelo fabricante do equipamento. A produção vaca/dia oscilou entre 29 e 32 kg de leite. De uma forma geral os animais que realizam maior número de ordenhas são mais pesados e mais produtivos.
O número de falhas está directamente associado à frequência da ordenha e influencia determinantemente o tempo de ligação. Logo quanto maior o número de falhas, maior o tempo necessário ao robot para efectuar a ligação do conjunto de tetinas, o que numa exploração com SOR é um aspecto que o produtor deve ter em consideração, uma vez que custa tempo precioso ao robot.
O SOR permite ter a perceção real de todo o efetivo em produção, bem como a deteção precoce de possíveis problemas que tenham implicações na produção de leite. A possibilidade de análise detalhada por animal de todos os parâmetros registados pelo SOR, exige do produtor atenção redobrada aos alertas fornecidos pelo sistema informático, e actuação imediata sobre os animais menorizando prejuízos na exploração.
Bibliografia
- Alves, S.R.P., 2010. Impacto do Sistema de ordenha robotizada na qualidade do leite. Tese de Mestrado Integrado em Medicina Veterinária, Departamento de Ciências Veterinárias, Universidade de Trás-os-Montes e Alto Douro, Vila Real.
- Koning, K., e Rodenburg, J., 2004. Automatic milking: State of the art in Europe and North America. Automatic Milking: A Better Understanding. A, 27–37 pp.
- Pirlo, G., Abeni, F., Capelletti, M., Migliorati, L. e Speroni, M., 2005. Automation in dairy cattle milking: experimental results and considerations. Italian J. Anim. Science; Vol. 4 (SUPPL.3): 17-25 pp.
- Pastell, M., Takko, M., Grohn, H., Hautala, M., Poikalainen, V., Praks, J., Veermae, I., Kujala, M. e Ahokas, J., 2006. Assessing Cows Welfare: weighing the Cow in a Milking Robot. Biosystems Engineering; 93(1): 81-87 pp.
